1. Ezaugarri teknikoakeVTOL motorra
In banatutako elektrizitateapropultsioan, motorrek helize edo haizagailu ugari mugitzen dituzte hegoetan edo fuselajean, hegazkinari bultzada ematen dion propultsio-sistema bat osatzeko. Motorraren potentzia-dentsitateak zuzenean eragiten dio hegazkinaren karga-ahalmenari. Motorraren potentzia-irteera gaitasuna, fidagarritasuna eta ingurumen-egokitzapena faktore garrantzitsuak dira propultsio elektrikodun hegazkinen ezaugarri dinamikoak eta segurtasuna zehazteko. Ibilgailu elektrikoen, droneen eta eVTOL motorren aukeraketa desberdina da kostu, aplikazio-eszenatoki eta beste arrazoi batzuengatik [1].

(Argazkiaren iturria: Network/Safran webgune ofiziala)
1) Ibilgailu elektrikoak: iman iraunkorragoamotor sinkronoak,Iman iraunkorreko motorrek, eraginkortasun handiagoa eta momentu handiagoa dutenek, gidatzeko esperientzia hobea eskain dezakete. Aldi berean, iman iraunkorreko motorren potentzia-dentsitate handiak ibilgailu elektrikoei bolumen beraren pean potentzia handiagoa lortzen ere lagun diezaieke.
(2) UAV: normalean erabiltzen den eskuilarik gabekoaKorronte zuzeneko motorra.Eskuilarik gabeko DC motorrak pisu eta zarata txikia du, eta mantentze-kostua baxua da, eta hori egokia da UAVen hegaldi-beharretarako; Bigarrenik, eskuilarik gabeko DC motorraren abiadura handiagoa da, eta hori egokia da dronen abiadura handiko hegaldi-beharretarako. Adibidez, DJIk eskuilarik gabeko motorrak erabiltzen ditu.
(3) eVTOL: Motorraren eraginkortasunari eta momentu-dentsitateari dagokionez eskakizun handiagoak dituenez, iman iraunkorreko motor sinkronoa oso irtenbide itxaropentsua da propultsio elektrikoko potentzia-sistemetarako, fluxu axialeko iman iraunkorreko motorrak erradial espazioaren erabilera-tasa handia baitu, eta potentzia-dentsitateak eta momentu-dentsitateak abantailak baitituzte luzera-diametro erlazio txikia dutenean. Gaur egungo VTOL hegazkin elektrikoek, hala nola Joby S4 eta Archer Midnight, guztiek iman iraunkorreko motor sinkronoak erabiltzen dituzte [1].
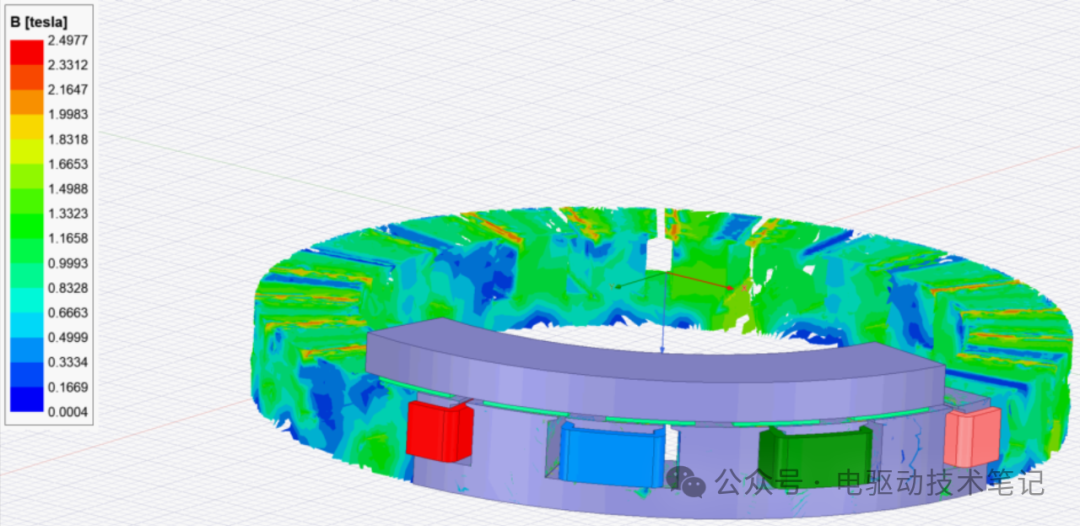
Hurrengo irudiak estatore bakarreko errotore bakarreko fluxu axialeko motorraren errotore finkoko indukzio magnetikoaren intentsitatearen hodeiko irudia erakusten du.
Hurrengo irudian hegazkin elektrikoen eta ibilgailu elektrikoen motorren parametroen konparaketa bat dago.

2.eVTOL motorraren garapen joera
Gaur egun, eVTOL potentzia sistemaren garapen joera nagusia motorraren egituraren pisua eta hozte sistemaren pisu lagungarria murriztea da, diseinu elektromagnetikoaren teknologia, kudeaketa termikoaren teknologia eta teknologia arina hobetuz, eta motorraren potentzia dentsitatea eta potentzia irteerako gaitasuna etengabe hobetzea baldintza aldakor ugaritan. "Hegalari autoen eta giltzarri teknologien ikerketa eta garapena" arabera, hegazkintzako propultsio motorrak motorraren gorputzaren potentzia dentsitate nominala 5 kW/kg baino gehiagokoa izatea lortu du tenperatura muga altuagoak dituzten isolamendu materialak, energia magnetiko dentsitate handiagoa duten iman iraunkorreko materialak eta egitura material arinagoak erabiliz. Motorraren egitura elektromagnetikoaren diseinua hobetuz, hala nola Halbach matrize magnetikoa, burdinazko nukleorik gabeko egitura, Litz alanbrezko bobinaketa eta beste teknologia batzuk erabiliz, baita motorraren beroa xahutzeko diseinua hobetuz ere, espero da motorraren gorputzaren potentzia dentsitate nominala 10 kW/kg-ra irits daitekeela 2030ean, eta potentzia dentsitate nominala 13 kW/kg-tik gorakoa izatea 2035ean [1].

3. Ibilbide elektriko hutsen eta hibridoen arteko konparaketa
Bide elektriko hutsarekin eta bide hibridoarekin alderatuta, fabrikatzaile garrantzitsuen egungo aukeraketatik abiatuta, etxeko eVTOL proiektua batez ere eskema elektriko hutsean oinarritzen da, litio-ioizko baterien energia-dentsitateak mugatuta, eta bidaiarientzako edukiera txikiko eVTOL da propultsio elektriko hutsaren teknologiaren lurreratze-eszenatokirik onena. Atzerrian, fabrikatzaile batzuek aldez aurretik plan hibridoa aurkeztu dute, eta hainbat proba eta iterazio-txandatan lidergoa hartu dute. Hurrengo taulan ikus daitekeen bezala, eskema hibridoa nabarmen sendoagoa da erresistentzia-angeluan, eta etorkizunean aplikazio gehiago lor ditzake distantzia ertain-luzeko eta altitude baxuko trafikoaren eszenatokian [1].
Argitaratze data: 2025eko otsailaren 27a